














Содержание
Чем отличается двигатель со впрыском топлива от карбюраторного с точки зрения пользователя? Здесь не нужно ни вытягивать подсос, ни играть с педалью газа при запуске двигателя. Автомобиль сам поднимает обороты для уверенной работы холодного мотора, сам опускает их до нормальных и никак не реагирует на включение фар или кондиционера, несмотря на увеличение нагрузки. До перехода на электронные дроссели эти функции выполнял отдельный узел – регулятор холостого хода (РХХ). Что такое РХХ? Это электронно-управляемый клапан, позволяющий системе впрыска увеличивать или уменьшать количество воздуха, попадающего в двигатель, независимо от положения дроссельной заслонки. Как только системы впрыска «научились» управлять непосредственно дросселем, надобность в отдельном РХХ пропала.
Часто употребляемый термин «датчик холостого хода» в корне неверен. Датчик – это узел, передающий какую-то информацию ЭБУ впрыска, регулятор ХХ – механизм исполнительный, которым ЭБУ воздействует на работу двигателя. Они стоят в разных концах алгоритма работы системы впрыска, и что-то общее иметь не могут. Появление термина «датчик холостого хорда» связано с малой технической грамотностью: любой непонятный узел, подключенный к «мозгам», можно посчитать датчиком. Датчик холостого хода действительно существовал на примитивных системах впрыска – это был простейший концевик, замыкавшийся при отпускании педали газа. И вот он-то и сообщал ЭБУ, что машина перешла на холостой ход. В дальнейшем же это определялось уже по датчику положения дроссельной заслонки, и отдельный «датчик холостого хода» был не нужен. 
Конструкции регулятора холостого хода
Где находится РХХ? Ответ зависит от конкретной конструкции регулятора. Распространены два варианта:
- с шаговым двигателем
- широтно-импульсным управлением.
Первые традиционно устанавливаются на корпусе дроссельной заслонки, вторые из-за больших габаритов устанавливаются отдельным узлом. Исключение – ряд японских автомобилей, где ШИМ-регуляторы компактны для установки на дросселе.
Регулятор холостого хода с шаговым управлением – это клапан, установленный на резьбовом валу шагового электродвигателя малой мощности. Так как шаговый мотор может чисто конструктивно совершать поворот только на определенный угол, то каждый управляющий импульс превращается в перемещение штока клапана на строго определенное расстояние. Этот тип РХХ широко распространен, а благодаря ВАЗовским автомобилям всем известен.

Главный недостаток таких регуляторов в необходимости установки нуля. ЭБУ не имеет возможности точно узнать, насколько открыт клапан регулятора, поэтому при включении зажигания вынужден пытаться полностью закрыть РХХ и считать это положение нулевым, рассчитывая перемещения клапана от него.
Ещё кое-что полезное для Вас:
Второй тип регуляторов с широтно-импульсным управлением из отечественных автомобилей знаком по «Газелям» и «Волгам» (его принято называть РДВ – регулятор дополнительного воздуха). Здесь, пока на его обмотки не подается напряжение, секторная заслонка открывается автоматически, пропуская полный поток воздуха. При работе РХХ же на его обмотки приходят импульсы с постоянной частотой, но с изменяющейся длительностью – чем она выше, тем меньше угол открытия заслонки РХХ и меньше объем проходящего сквозь регулятор воздуха. Но может быть и наоборот (импульсы будут пытаться открыть нормально закрытую заслонку).

Достоинство таких регуляторов холостого хода – в гарантированной самоустановке нуля: в момент включения зажигания клапан РХХ точно открыт или закрыт. К тому же он меньше покрывается нагаром за счет высокочастотной вибрации ротора (за промежуток между импульсами возвратная пружина успевает сдвинуть заслонку назад), даже если мотор работает на установившемся режиме. В то же время шаговые РХХ на постоянном режиме работы двигателя неподвижны и нагар собирают активнее.
Неисправности РХХ
Так как работает РХХ, исходя из названия, в первую очередь на холостом ходу, то и его неисправности заметны на этом режиме. Как и у любого электромеханического узла, у регулятора холостого хода выше вероятность отказа механики. Подвижные части покрываются отложениями от картерных газов, если же на моторе установлена система УПК (рециркуляция выхлопных газов), то РХХ «коптится» еще быстрее.
Поскольку ЭБУ впрыска не может отслеживать реальное изменение проходного сечения регулятора холостого хода, то малейшие подклинивания штока или ротора заслонки моментально выдадут себя. Плавание, зависание оборотов холостого хода, невозможность запуска без педали газа указывают на то, что регулятор холостого хода подклинивает или не движется вовсе. Такие неисправности РХХ не вызывают появления каких-либо кодов ошибок в памяти ЭБУ впрыска.
Проблемы с электрической частью встречаются реже, причем обычно не в самом регуляторе, а в разъеме и проводке: обрывы, короткие замыкания, окисление контактов. Здесь уже будет установлена ошибка со стандартным кодом по OBD-II:
- P1513 – короткое замыкание на массу.
- P1514 – обрыв цепи.
Самостоятельная диагностика регулятора
Признаки неисправности регулятора холостого хода – повод провести хотя бы базовую проверку. Извлеките регулятор и проверьте состояние: обильные отложения углерода станут прямым поводом выполнить чистку, чтобы исключить их влияние на РХХ.
В этом плане клапана с ШИМ-управлением удобнее: в них можно залить очиститель карбюратора и оставить регулятор холостого хода «отмокать», шаговые РХХ же моют под давлением струи из баллона, расход средства при этом выше.
Когда РХХ извлечен, сразу проверьте его уплотнение (прокладку или резиновое кольцо), если на автомобиле РХХ установлен на патрубок или дроссель. Внешние РХХ соединяются со впускным коллектором резиновыми патрубками – внимательно осмотрите их в поисках трещин или разрывов. Дефектную прокладку или патрубок потребуется заменить.
Гораздо проще проверить РХХ при наличии хотя бы простейшего диагностического оборудования, например – адаптера ELM327 с соответствующим программным обеспечением. Рассмотрим проверку регулятора холостого хода на примере программы OpenDiag (которая есть и в бесплатной, и в платной версии, в том числе и для смартфонов).

Как проверить РХХ на работающем моторе? Запустите программу и обратите внимание на две строки: желаемое и текущее положение регулятора. Цифры изменяются синхронно с изменением оборотов (снижение по мере прогрева). При включении фар или кондиционера Вы увидите изменение степени открытия РХХ, но обороты мотора при этом не должны падать. Причем первой меняется строка «желаемое положение» (этот параметр рассчитывается ЭБУ впрыска каждый цикл), а за ней – «текущее положение» (для шаговых РХХ – после передачи каждой серии импульсов на регулятор смещение составит один шаг, вплоть до совпадения «текущего» и «желаемого»). Если же данные меняются, а обороты нет – то у нас или серьезный подсос воздуха, компенсировать который закрытие РХХ не может, или сам регулятор не движется.
Можно проверить РХХ еще быстрее. Перейдем в меню управления исполнительными механизмами, вызываемое из верхнего левого угла. Здесь нас интересуют параметры «Желаемое положение регулятора ХХ» и «Желаемые обороты ХХ»: нажимая кнопки «вправо-влево» при работе мотора, можно либо изменять текущее положение клапана РХХ, либо устанавливать по желанию обороты, точно так же управляя клапаном. Любое вмешательство должно сразу отражаться на работе двигателя. Если же в каком-то участке хода команда на его изменение не вызывает реакции, то становится видно, что в этом месте регулятор холостого хода подклинивает.
Есть такой странный на первый взгляд параметр, который может вызвать вопросы у начинающего диагноста. Давайте разберемся для чего он и как с ним работать.
Разберем для начала аббревиатуру. ISC — Idle Speed Control, по-русски говоря — контроль холостого хода (оборотов холостого хода). Step.Mtr — измерение (подсчет) числа шагов, можно по простому назвать так. С этим разобрались. Едем дальше.
Этот параметр характеризует состояние штока регулятора Х.Х. (который представляет из себя шаговый мотор) относительно байпасного канала.

Нормальное состояние работы системы регулирования на прогретом моторе, как правило, характеризуется значениями ISC STEP.MTR в районе 20-30 шагов.
Чем больше шагов, тем больше отодвинут шток, тем больше воздуха система пытается впустить в двигатель для увеличения или поддержания оборотов Х.Х.
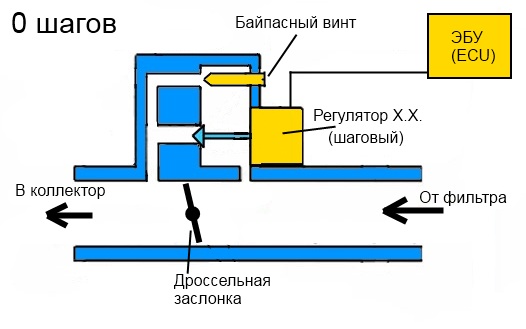
Чем меньше шагов, тем больше шток выдвигается и запирает байпасный канал. ISC STEP.MTR в 0 шагов говорит о том, что шток полностью перекрывает байпасный канал.
Теперь давайте разберемся как соотнести значения с конкретными проблемами.
Обращать внимание на этот параметр приходится когда холостые обороты начинают вести себя странно — плавать, просаживаться или подниматься.
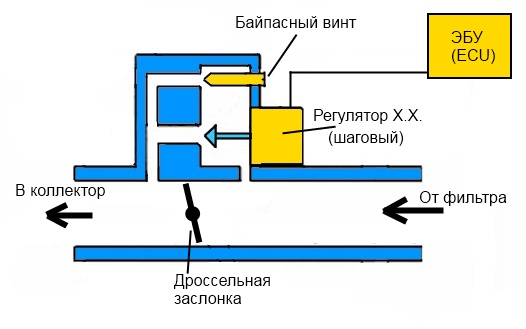
У дроссельной заслонки есть "пятак" — круглая шайба, которая призвана перекрывать поток воздуха во впуск через дроссель при не нажатой педали акселератора. Полностью просто так перекрыть поток воздуха нельзя, иначе двигатель заглохнет. Поэтому существует байпасный канал, который ведет воздух в обход дросселя и поддерживает работу двигателя.
Прохождение воздуха через байпасный канал регулируется байпасным винтом(у кого он есть) и штоком регулятора.
В результате засорения байпасного канала со стороны винта или со стороны штока прохождение воздуха затрудняется. В системах с байпасным винтом обычно регулятор вмешивается в работу только когда обороты падают так низко, что двигатель может заглохнуть, тогда количество шагов ISC STEP.MTR резко возрастает (шток втягивается открывая байпасный канал со своей стороны) в этот момент. В системах с винтом рабочее количество оборотов обычно выставляется именно винтом.
В системах без винта регулятор, естественно, полностью регулирует холостые. Там забитость байпасного канала очень характерно выражается увеличением числа шагов ISC STEP.MTR. Но его возможности не безграничны, особенно когда канал от нагара сужается, тогда регулятор в определенный момент уже не сможет контролировать холостые и машина может начать глохнуть на холостых.
Едем дальше. Нагар может обложить пятак дроссельной заслонки или ее вал так, что она не сможет до конца закрыться и будет постоянно пропускать воздух, тогда обороты будут наоборот выше, а параметр ISC STEP.MTR будет стремиться своим значением к 0. Также это может быть и в случае, когда пятак дросселя износился до такой степени, что при полностью закрытой заслонке существуют щели между корпусом и пятаком (см.фото ниже), через которые воздух протекает минуя байпасный канал. Отличить одно от другого, не снимая патрубки с дросселя можно соотнеся показания ISC STEP.MTR с показаниями датчика положения дроссельной заслонки TPS, тогда можно будет сказать приоткрыта заслонка или нет, сравнив показания TPS с номинальными. Иногда на сканерах еще есть индикация холостого хода — индикация да/нет — т.е. холостой ход или дроссель все-таки закрыт не до конца. Но это не всегда так очевидно, поэтому по возможности стоит все-таки стоит снять дроссель и осмотреть его, в том числе и сквозной просвет.

В любом случае надо понимать, что данный параметр не может дать абсолютной информации обо всем, он лишь может направить вас в направлении определенного диагноза, который можно будет уже поставить изучив состояние дросселя и показание других датчиков.
Например у вас может быть дырка во впускном коллекторе — так бывает у машин, чьи коллекторы не алюминиевые, а просто крашенная железяка, которая прогнивает.
В этом случае у вас также будут завышенные холостые, но дроссель может быть при этом в порядке, а показания ISC STEP.MTR при этом будут стремиться к 0. Тогда нужно будет руководствоваться дополнительно показаниями лямбды, которая, как правило, будет указывать вам на обедненную смесь и свечи скорее всего будут с белым налетом, да и параметр топливной коррекции Fuel Trim будет в зоне положительных значений.
А может быть и так, что обороты Х.Х. низкие т.к. у вас льют форсунки по причине своей засранности и тогда показания ISC STEP.MTR будут выше номинала и если сопоставить эти значения с состоянием свечей и показаниями лямбда-зонда, то можно будет уточнить этот диагноз.
В случае, если с машиной что-то кардинально не так, что это даже станет заметно ЭБУ и он поймет, что регулятор Х.Х. не может справиться с поддержанием оборотов в зоне необходимых значений система скорей всего выбросит ошибку P0505 — Idle Control System Malfunction.
![]()
Рисунок 1.8 – Направляющие втулки в передней опоре ротора.
Таким образом, к изучению принципа работы РХХ необходимо по-
дойти со стороны изучения физических основ ШД, так как он является ос-
новной составляющей РХХ.
2 ФИЗИЧЕСКИЕ ОСНОВЫ ШАГОВЫХ ДВИГАТЕЛЕЙ
Шаговые двигатели уже давно и успешно применяются в самых раз-
нообразных устройствах. Их можно встретить в дисководах, принтерах,
плоттерах, сканерах, факсах, разнообразном промышленном и специаль-
ном оборудовании и наконец в РХХ.
2.1 Общие сведения
Шаговый двигатель – это синхронный двигатель, в котором вра-
щающееся магнитное поле статора создается управляющими импульсами,
а ротор представляет собой постоянный магнит с несколькими парами по-
Существует три основных типа ШД:
– двигатели с переменным магнитным сопротивлением;
– двигатели с постоянными магнитами;
Рис.2.1 – Двигатель с переменным магнитным сопротивлением.
ШД с переменным магнитным сопротивлением имеют несколько по-
люсов на статоре и ротор зубчатой формы из магнитомягкого материала
(рисунок 2.1). Намагниченность ротора отсутствует, в связи с чем в таких двигателях не обеспечивается больший магнитный поток и, как следствие,
большой момент, поэтому их довольно редко используют в промышленно-
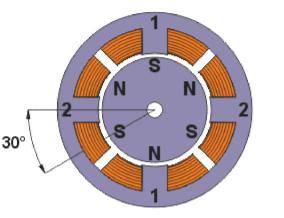
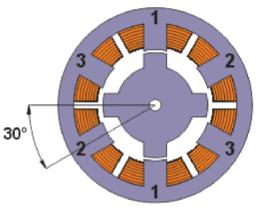
ШД с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты (рисунок 2.2). Чере-
дующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие,
больший момент, чем у двигателей с переменным магнитным сопротивле-
Рисунок 2.2 – Двигатель с постоянными магнитами.
ШД с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость.
На практике ШД с постоянными магнитами обычно имеют 48 – 24
шага на оборот (угол шага 7.5 – 15 град).
Гибридные ШД являются более дорогими, чем двигатели с постоян-
ными магнитами, зато они обеспечивают меньшую величину шага, боль-
ший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3.6 – 0.9 град.).
Гибридные двигатели сочетают в себе лучшие черты двигателей с пере-
менным магнитным сопротивлением и двигателей с постоянными магни-
тами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении (рисунок 2.3), и разделен на две части, между которыми рас-
положен цилиндрический постоянный магнит. Таким образом, зубцы верх-
ней половинки ротора являются северными полюсами, а зубцы нижней по-
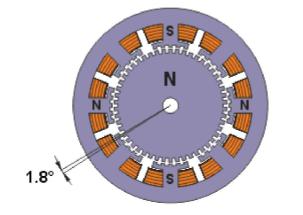
ловинки – южными. Кроме того, верхняя и нижняя половинки ротора по-
вернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок.
Зубчатые полюсные наконечники ротора, как и статор, набраны из отдель-
ных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквива-
лентных полюсов, в отличие от основных полюсов, на которых располо-
жены обмотки. Обычно используются 4 основных полюса для двигателей с шагом 3.6 град. и 8 основных полюсов – с шагом 1.8 и 0.9 град. двигателей.
Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в оп-
ределенных положениях ротора, что улучшает статический и динамиче-
ский момент. Это обеспечивается соответствующим расположением зуб-
цов, когда часть зубцов ротора находится строго напротив зубцов статора,
а часть между ними.
Рисунок 2.3 – Гибридный двигатель.
Применение гибридных ШД, в настоящее время, является более пер-
спективным, но дорогостоящим.
В зависимости от конфигурации обмоток ШД делятся на биполярные
Биполярный ШД имеет одну обмотку в каждой фазе, которая для из-
менения направления магнитного поля должна переполюсовывается сис-
темой управления. Для такого типа ШД требуется мостовой выходной кас-
кад, или полумостовой с двухполярным питанием, для каждой обмотки.
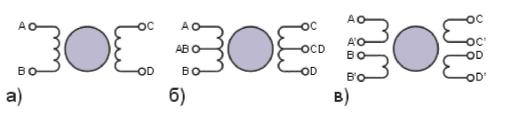
Рисунок 2.4 – Конфигурации обмоток шаговых двигателей.
Всего биполярный ШД имеет две обмотки и, соответственно, четыре вывода (рисунок 2.4а).
Униполярный ШД также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление маг-
нитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается система управления, которая должна иметь только 4 простых ключа. Таким образом, в униполярном ШД используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри, поэтому такой ШД может иметь 5 или 6 выводов (рисунок 2.4б). Иногда униполярные ШД имеют раздельные 4 обмотки, по этой причине их ошибочно называют
4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, по-
этому всего выводов 8 (рисунок 2.4в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный ШД с двумя обмотками и отводами тоже мож-
но использовать в биполярном режиме, если отводы оставить неподклю-
ченными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Достоинствами ШД являются:
1. Возможность прецизионного позиционирования без применения обратной связи, так как угол поворота ротора определяется числом им-
пульсов, которые поданы на двигатель.
2. Возможность обеспечения полного момента в режиме остановки
(если обмотки запитаны).
3. Возможность получения очень низких скоростей вращения на-
грузки, присоединенной непосредственно к валу двигателя без промежу-
4. Скорость пропорциональна частоте входных импульсов.
5. Высокая надежность (отсутствие щеточного узла).
6. Высокий срок службы, который фактически определяется сроком службы подшипников.
К недостаткам ШД следует отнести:
1. Присущее явление резонанса — внезапное падение момента на не-
которых скоростях, что может привести к пропуску шагов и потере син-
хронности. Проявляется в том случае, если частота шагов совпадает с соб-
ственной резонансной частотой ротора двигателя.
2. Возможность потери контроля положения ввиду работы без об-
3. Потребление энергии не уменьшается даже без нагрузки.
4. Затруднена работа на высоких скоростях.
5. Невысокая удельная мощность.
6. Относительно сложная схема управления.
2.2 Способы управления
Существует несколько способов управления фазами ШД.
1. Полношаговый режим без перекрытия фаз (”one phase on” full step
или wave drive mode). Реализуется попеременной коммутацией фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рисунок 2.5а). Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя.
Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени используется 50% обмоток, а
для униполярного – только 25%. Это означает, что в таком режиме не мо-
жет быть получен полный момент.
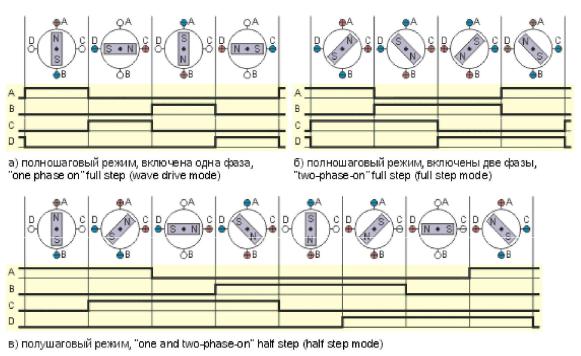
Рисунок 2.5 – Способы управления фазами ШД.
Полношаговый режим с перекрытием фаз (”two-phase-on” full step
или просто full step mode). Реализуется коммутацией фаз с перекрытием
(две фазы включены в одно и то же время), причем управляющие импуль-
сы в одной фазе опережают управляющие импульсы в другой на 90 эл.
град.. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рисунок 2.5б) и обеспечивается при-
мерно на 40% больший момент, чем в случае одной включенной фазы.
Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на полшага.
Полушаговый режим (”one and two-phase-on” half step или просто half step mode). Является комбинацией первых двух, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распростра-
нен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рису-
нок 2.5в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения раз-
мера шага этот способ управления позволяет частично избавиться от явле-
ния резонанса. Полушаговый режим обычно не позволяет получить пол-
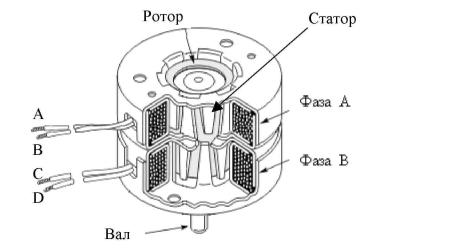
2.3 Принцип работы шагового двигателя РХХ ВАЗ
Шаговый двигатель РХХ ВАЗ является биполярным ШД с постоян-
ными магнитами. Магнитопровод статора изготовлен в виде штампованно-
го стакана (рисунок 2.6). Внутри находятся полюсные наконечники в виде ламелей. Обмотки фаз размещены на двух разных магнитопроводах, кото-
рые установлены друг на друге. Ротор представляет собой цилиндрический многополюсный постоянный магнит.
Рисунок 2.6 – Разрез шагового двигателя с постоянными магнитами Магнитная система ШД РХХ ВАЗ представлена на рисунке 2.7.
Управление ШД РХХ ВАЗ осуществляется в полношаговом режиме
с перекрытием фаз (смотри рисунок 2.5б).
В момент включения фазы А (АВ) в полюсах статора наводится маг-
нитное поле, которое при взаимодействии с магнитным полем постоянных магнитов ротора создает электромагнитный момент, который позициони-
рует ротор относительно фазы А в положение показанное на рисунке 2.8а (полюса ротора находятся под противоположными полюсами статора фазы А), а относительно фазы В – на рисунке 2.8.б.






